
Nuestras entrada anterior introdujo Doggie, un adaptador CAN Bus - USB modular y de código abierto diseñado para simplificar el trabajo con redes CAN Bus, permitiendo la exploración y el desarrollo seguros en el espacio de la automoción.
El mes pasado, Doggie subió al escenario del Aldea del pirateo de coches durante el Conferencia H2HC los días 14 y 15 de diciembre en São Paulo. Esta emocionante villa contó con varias presentaciones y talleres que exploraban el mundo de la seguridad en la automoción. El equipo de Faraday presentó Doggie de una forma interactiva única, permitiendo a los asistentes sumergirse en la exploración práctica del bus CAN.
Para crear una experiencia atractiva, desarrollamos un entorno simulado con una red CAN Bus en funcionamiento, que permitía a los participantes interactuar utilizando Doggie o su propio hardware. Este entorno constaba de dos componentes principales:
1- Un PC con el simulador CARLA
CARLA es un simulador de coche muy realista que suele utilizarse para entrenar y probar algoritmos de vehículos autónomos. En nuestra configuración, CARLA se conectó al bus CAN a través de Doggie.
2- Una Raspberry Pi con un mando de juegos
La Raspberry Pi actuó como puente entre el controlador y el bus CAN. Interpretaba las pulsaciones de los botones del controlador, las traducía en comandos de control y utilizaba Doggie para enviarlos a través del bus CAN. El flujo de comunicación funcionaba así:
El flujo de comunicación funcionaba así:
- Un usuario pulsaba botones en el controlador, que la Raspberry Pi interpretaba como órdenes.
- La Raspberry Pi envió estos comandos a través del CAN Bus vía Doggie.
- El PC recibía las órdenes, interactuaba con el simulador CARLA y ejecutaba las acciones correspondientes (por ejemplo, acelerar, dirigir, abrir puertas o encender luces).
En resumen, creamos un Controlador de bus CAN y un Interfaz CAN Bus para el simulador CARLA y los conectó a la perfección.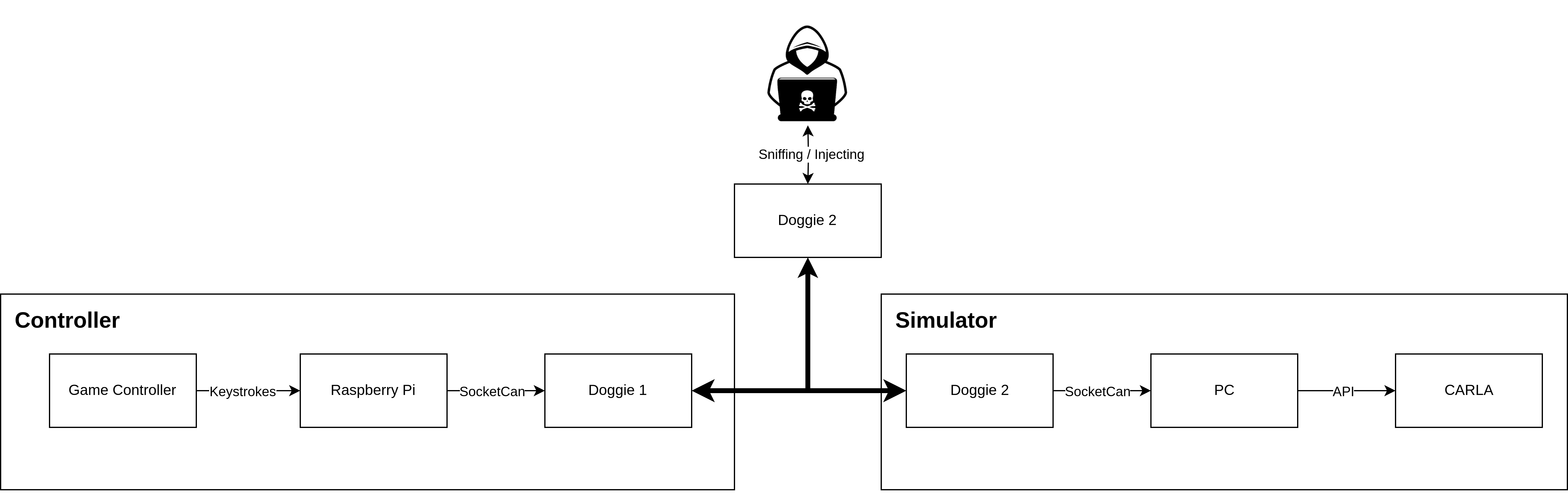
Los participantes tuvieron la oportunidad de controlar el coche simulado utilizando el controlador, a la vez que experimentaban con el bus CAN. Pudieron:
- Mensajes de ingeniería inversa en el autobús.
- Inyecta comandos en el bus para manipular el simulador.
- Provocar la colisión del coche mientras conducía otra persona.
- Desbloquea las puertas del coche simulado.
- Explora otros innumerables escenarios creativos.
Hemos mantenido deliberadamente la sencillez de los mensajes para asegurarnos de que incluso los principiantes puedan seguirnos, comprender los fundamentos de la comunicación CAN Bus y aprender con nosotros en tiempo real.
El montaje fue todo un éxito y atrajo a muchos visitantes deseosos de aprender, charlar y jugar. Desde entusiastas de la ingeniería inversa hasta curiosos principiantes, todos se fueron con un conocimiento más profundo del bus CAN y del potencial de Doggie.
Para los que no pudieron asistir, ¡hemos puesto toda la configuración a su disposición en línea! Puedes encontrar el repositorio con todos los scripts y herramientas que necesitas para recrear la experiencia tú mismo.
¿Formación, gestión de vulnerabilidades, servicios de red teaming o escaneado continuo? Le tenemos cubierto. ⚡