
Our previous post introduced Doggie, an open-source and modular CAN Bus – USB adapter designed to simplify working with CAN Bus networks, enabling secure exploration and development in the automotive space.
Last month, Doggie took the stage at the Car Hacking Village during the H2HC conference on December 14th and 15th in São Paulo. This exciting village featured various presentations and workshops exploring the world of automotive security. The Faraday team showcased Doggie in a uniquely interactive way, allowing attendees to dive into CAN Bus exploration hands-on.
To create an engaging experience, we developed a simulated environment with a working CAN Bus network, enabling participants to interact using Doggie or their own hardware. This environment consisted of two main components:
1- A PC running the CARLA simulator
CARLA is a highly realistic car simulator often used to train and test autonomous vehicle algorithms. In our setup, CARLA connected to the CAN Bus via Doggie.
2- A Raspberry Pi with a game controller
The Raspberry Pi acted as a bridge between the controller and the CAN Bus. It interpreted button presses on the controller, translated them into control commands, and used Doggie to send them over the CAN Bus. The communication flow worked like this:
The communication flow worked like this:
- A user pressed buttons on the controller, which the Raspberry Pi interpreted as commands.
- The Raspberry Pi sent these commands over the CAN Bus via Doggie.
- The PC received the commands, interacted with the CARLA simulator, and executed the corresponding actions (e.g., throttle, steering, opening doors, or switching lights).
In short, we created a CAN Bus controller and a CAN Bus interface for the CARLA simulator and seamlessly connected them.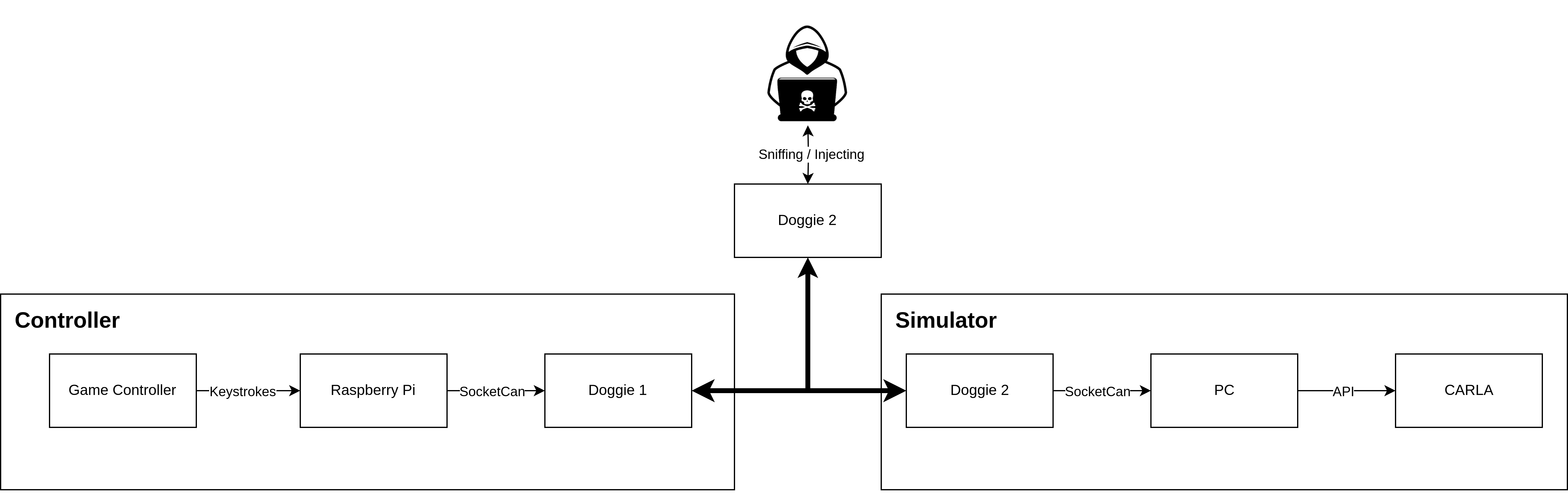
Participants had the opportunity to control the simulated car using the controller while also experimenting with the CAN Bus. They could:
- Reverse engineer messages on the bus.
- Inject commands into the bus to manipulate the simulator.
- Cause the car to crash while another person was driving.
- Unlock the simulated car’s doors.
- Explore countless other creative scenarios.
We deliberately kept the messages simple to ensure that even beginners could follow along, understand the basics of CAN Bus communication, and learn with us in real-time.
The setup was a huge success, attracting many visitors eager to learn, chat, and play. From reverse engineering enthusiasts to curious beginners, everyone left with a deeper understanding of CAN Bus and Doggie’s potential.
For those who couldn’t attend, we’ve made the entire setup available online! You can find the repository with all the scripts and tools you need to recreate the experience yourself.
Trainings, vulnerability management, red teaming services, or continuous scanning? We’ve got you covered. ⚡